

概要
特長
①複数の通信規格に対応
- 豊富な車載/汎用インターフェースを搭載し、周辺機器と柔軟に連携可能
- 車載インターフェース:CAN / CAN FD x 4 ch、LIN、10/100BASE-T1
- 汎用インターフェース:デジタル入力 x 4 ch、デジタル出力 x 4 ch、アナログ入力 x 2 ch、アナログ出力 x 2 ch(オプション)、RS-232(2線式)
- 全チャンネル同時に、モニタリング/エミュレーションの制御が可能
②すぐ使える標準アプリケーション&SDK
- 標準アプリケーションは、シンプルで直感的な操作画面を採用
- モニタリング/ロギング/エミュレーションなど、試験に必要な機能を網羅
- プログラミングレスでエミュレーション画面を作成可能
- 標準アプリケーションおよびSDK(ソフトウェア開発キット)は製品に付属しており、追加費用なしで購入後すぐに使用可能
③スタンドアロン動作
- PCレスでもロギングなどは、CANTOOL A1単体で動作可能
④SDKでお客様環境への適合性アップ(スクリプト/アプリ開発)
- PythonスクリプトやSDKを用いたアプリケーションを作成することで、CANTOOL A1を自由に制御可能
- お客様の使用環境/運用フローに合わせて最適化
⑤維持費ゼロ&1年間のサポート
- 保守費などのランニングコストは一切不要
- ソフトウェアバージョンアップは無償対応(一部有償の場合あり)
- ご購入後1年間の電話及びメールサポート
機能/仕様
機能
| 機能 | 詳細 |
| モニタリング |
2種類のバスモニタモードがあります。 時系列順の表示や信号ごとの表示ができます。 データのフィルタリングもできます。 |
| ロギング |
ログファイルは、デバイスモードではPCに、スタンドアロンモードでは CANTOOL A1のmicroSDカードに保存されます。 また、フィルタリングにより特定のデータのみのロギングもできます。 |
| エミュレーション |
定義されたFrameやSignalの値を任意のタイミングで送信できる機能に加え、 データを高精度な周期で自動送信する機能を備えています。 さらに、標準アプリケーション内でユーザー独自の操作画面を簡単に作成し、 そこから値を変更することもできます。 |
| データ再生 | ログファイルを再生します。 |
| スクリプト |
スクリプトによりCANTOOL A1を制御します。 データの送受信に加え、汎用入出力の制御もできます。 |
|
SDK (ソフトウェア開発キット) |
ユーザーがCANTOOL A1を自由に操作することができるプログラミング環境をサポートします。 |
仕様
|
製品型番 |
CTA101-D0E1T | |
| 標準外形寸法(W × D × H) | 107 × 74 × 43 mm(突起部含まず) | |
| 質量 | 約200 g | |
| ターゲットインターフェース | CAN | CAN / CAN FD(~ 2 Mbps)× 4 ch(各ch 終端抵抗 120 Ω 内蔵) |
| LIN | Master / Slave 切替 × 1 ch | |
| 車載イーサネット | 10/100BASE-T1 × 1 ch | |
| 汎用入出力 | デジタル出力(12V、オープンドレイン)× 4 bit | |
|
デジタル入力(0~12 V)× 4 bit |
||
| RS-232(2線式)× 1 ch | ||
| アナログ入力(0~36 V、シングルエンド入力)×2 ch | ||
| アナログ出力 ※1(0~5 V、シングルエンド出力)×2 ch | ||
| ユーザーインターフェース | LED × 5 | |
| スイッチ × 3 | ||
| I/O |
USB2.0 Type-A(Host)× 1 |
|
| microSDカードスロット × 1(SDHC対応、最大32 GB) | ||
| イーサネット 10/100/1000BASE-T × 1 | ||
|
ホストインターフェース |
USB3.0 Type-C(Device)× 1 | |
| 動作電源 |
車載バッテリ(DC 7~36 V)/ ACアダプタ(DC 12 V/1 A)/ USB(DC 5 V / 1.5 A以上) |
|
| 動作周囲温度 | 0~40℃(結露なきこと) | |
※1 オプション対応(受注生産)
使い方
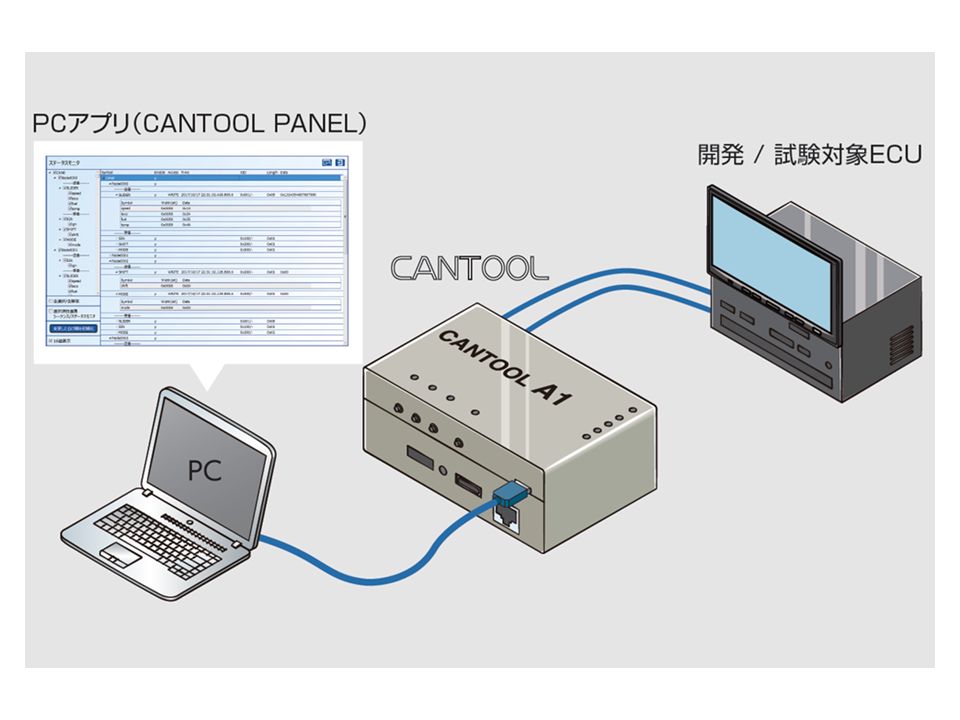
CANTOOL A1の接続方法
デバイスモード
PCに接続することで、すべての機能が使用可能
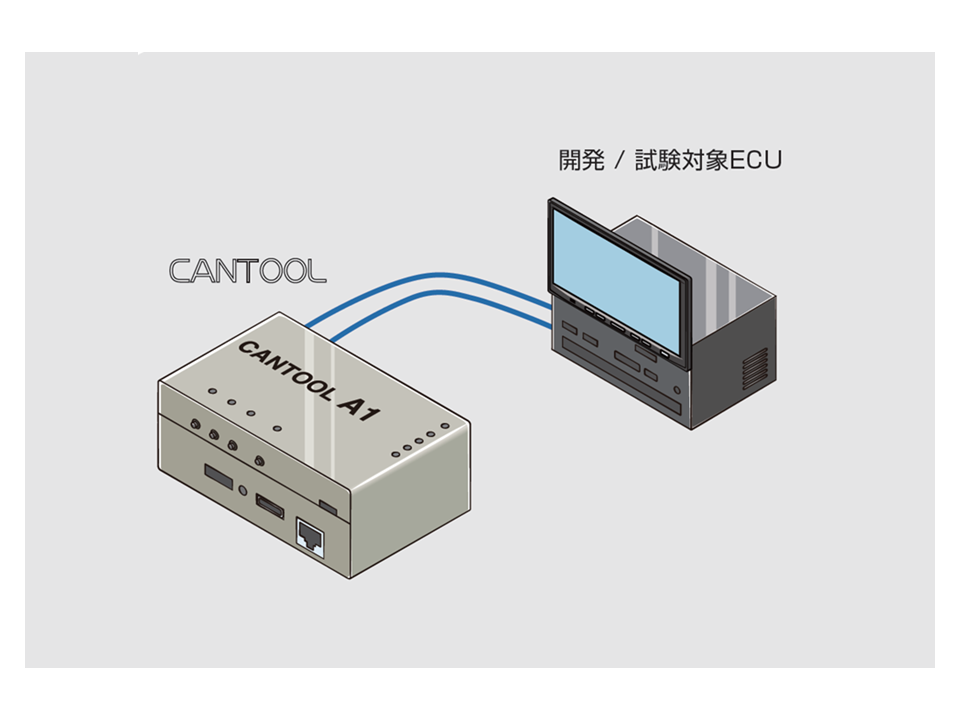
スタンドアロンモード
周期送信、ロギング、データ再生、スクリプトを自立して実行可能
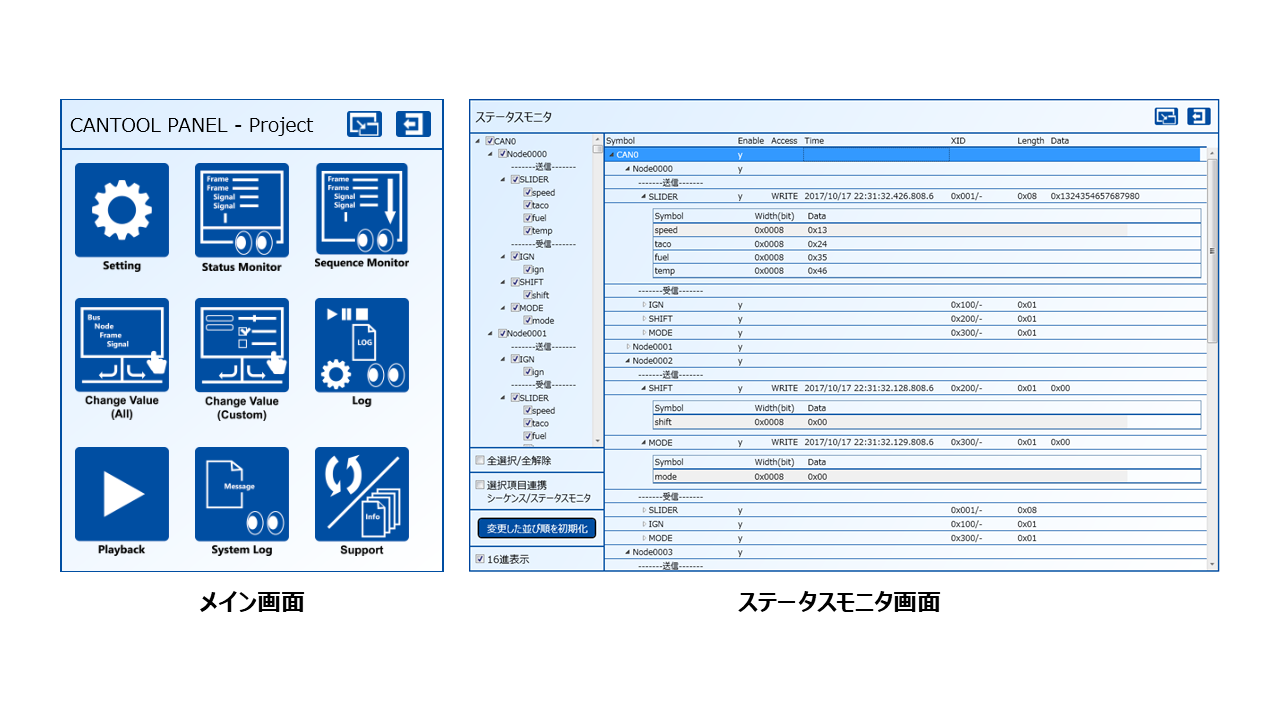
標準アプリケーションの画面例
CANTOOL A1使用例
CANTOOL A1は、ECU開発の様々な場面での利用が可能です。
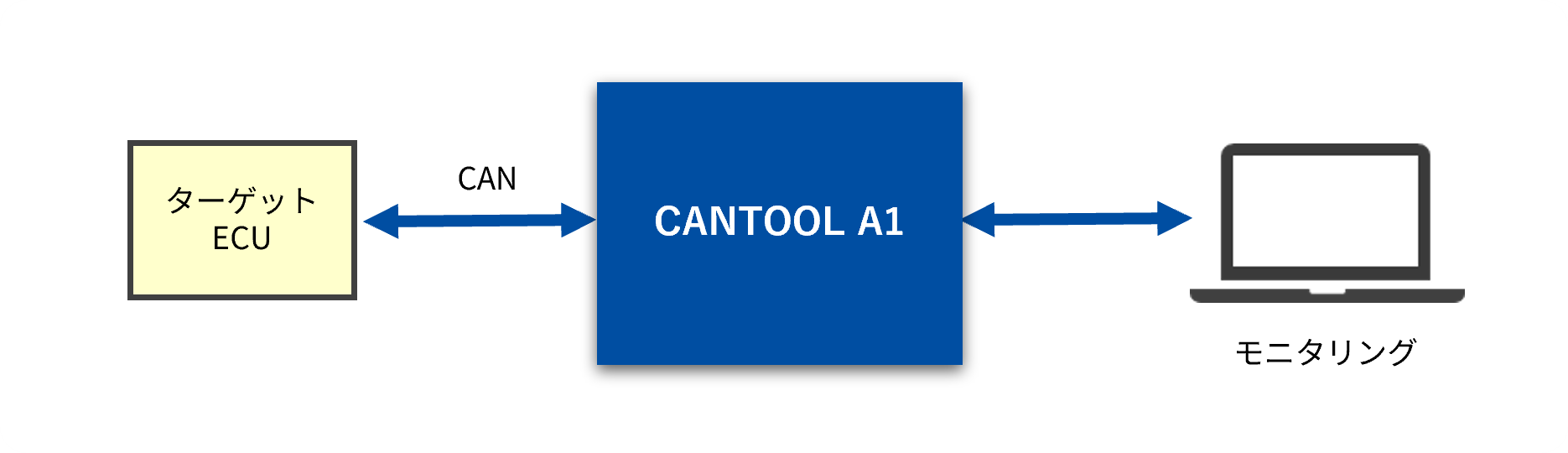
◆ソフトウェア単体テスト/機能検証
ターゲットECUと1対1で接続し、CAN信号のモニタ/ログ取得に加えて、周期送信・疑似フレーム送信で入力刺激を与えながら挙動を確認できます。通信観点の単体検証に活用できます。
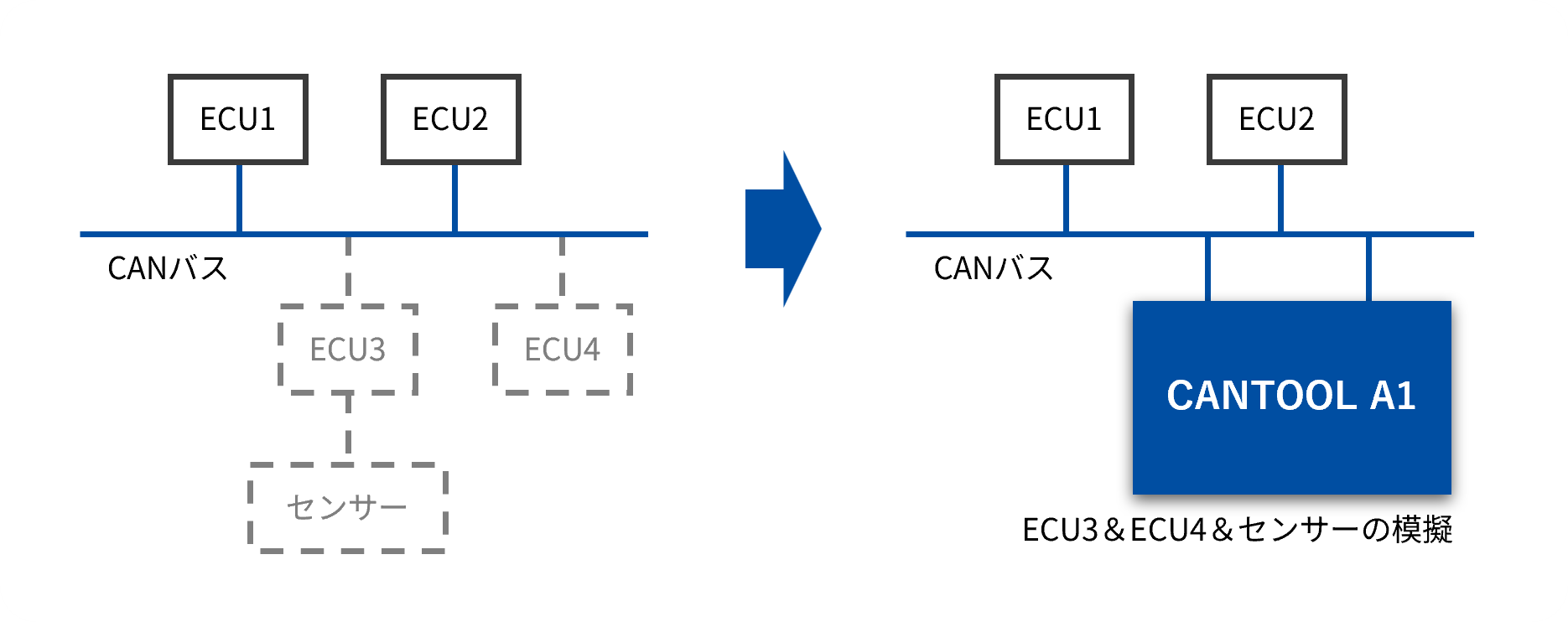
◆ECU結合テスト/総合検証
必要なECUやセンサが未だ揃っていなくとも、CANTOOL A1でECU相当のCANノード(送受信・周期送信・シナリオ送信)を模擬し、ネットワーク上の相互作用や診断・状態遷移を確認できます。結合段階の不具合切り分け(相手ECU依存の判別)にも有効です。
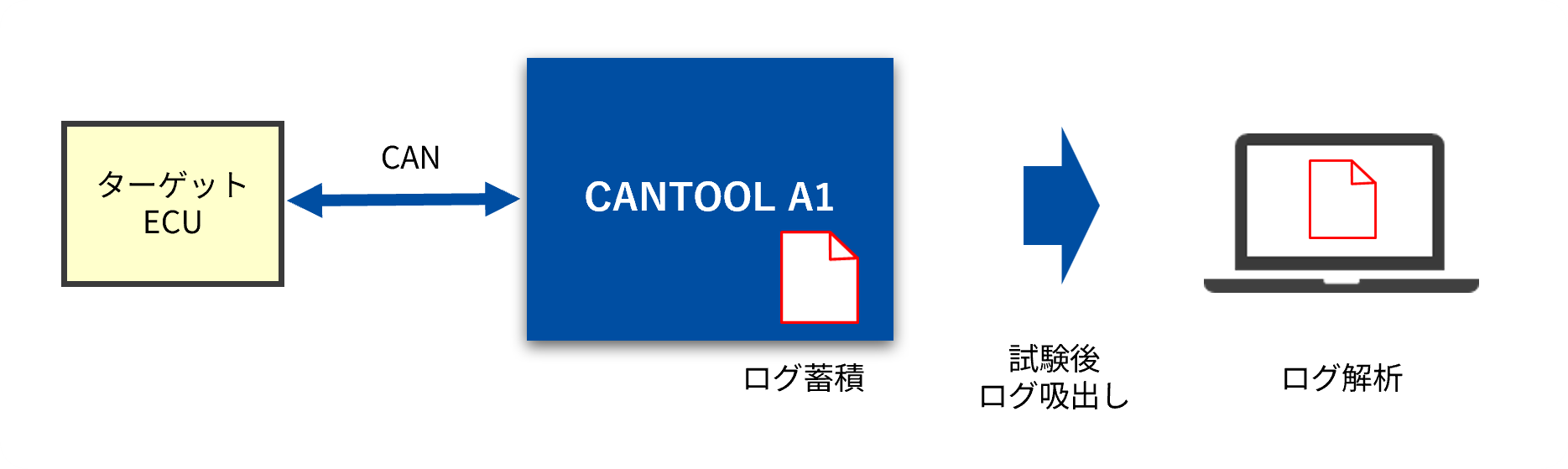
◆回帰試験/連続試験
CANTOOL A1をスタンドアロンで動作させ、PCレスで同一シナリオの繰り返し実行や長時間の連続運転を行えます。CANTOOL A1本体内部にログを蓄積し、試験後に回収して、ソフト更新前後の差分確認(回帰)や、長時間動作での間欠事象・通信品質の確認(連続)に活用できます。
活用例
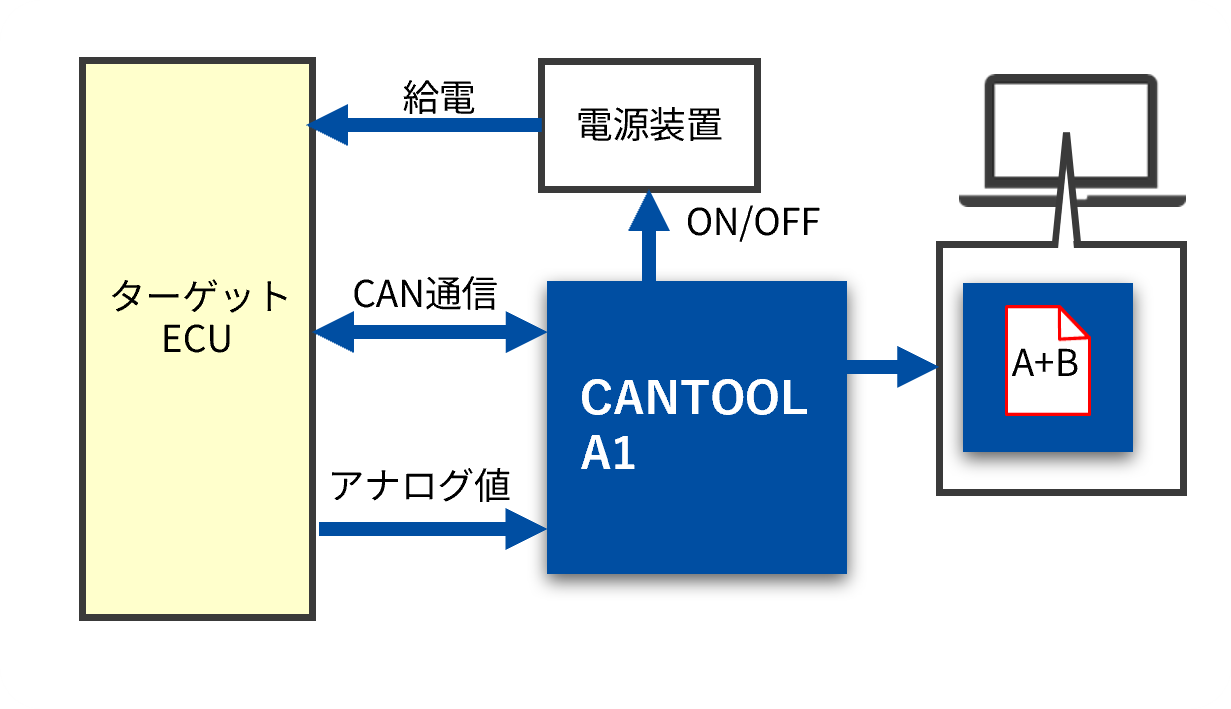
試験の一元化(データ一括取得/開始操作/自動電源OFF)
CANTOOL A1を試験のハブとして、計測・ログ取得・試験開始/終了操作を一元化します。複数機器に分散していたログを同一タイムベースでまとめて取得し、試験終了後は条件に応じて自動停止・自動電源OFFまで行うことで、後処理と運用負荷を削減します。
[Before]
- 試験開始/終了は手動操作
- 機器ごとに個別ログ取得
- 試験終了後にログ回収・マージが必要
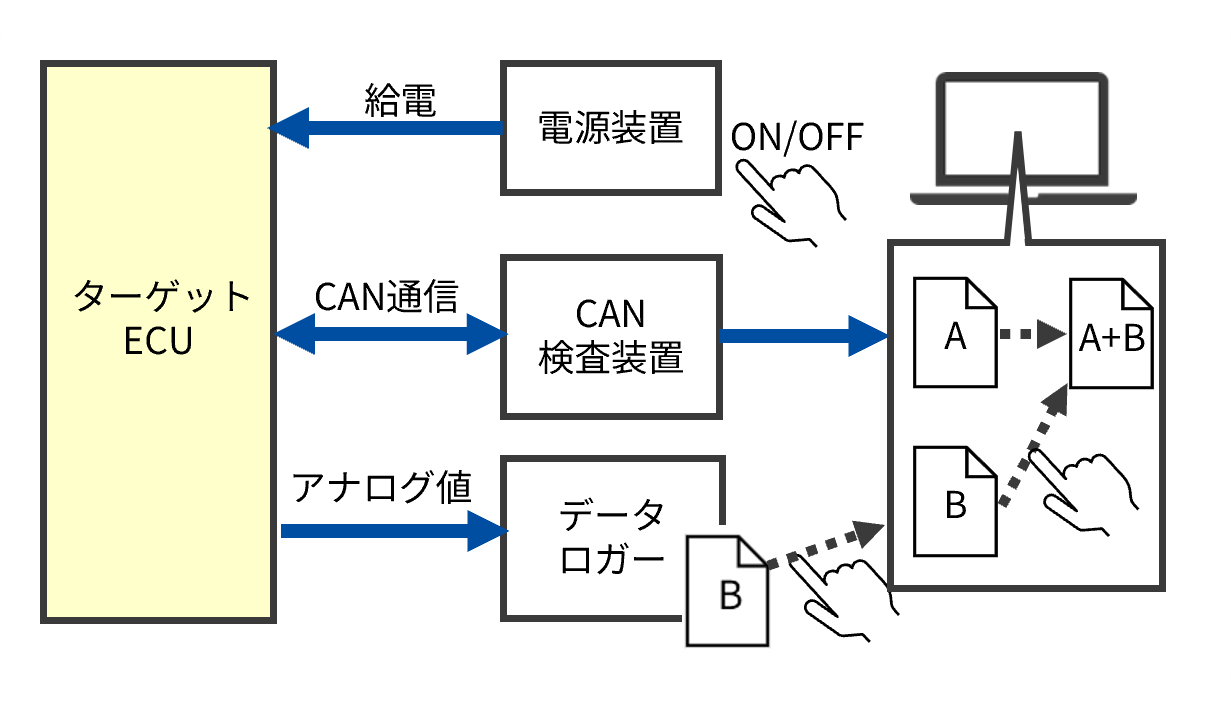
[After]
- CANTOOL A1からのトリガで試験開始/終了を自動化
- CANTOOL A1でログを一括取得、マージ不要でそのまま解析へ
- 試験終了後に自動電源OFFも可能
Pythonによる試験環境のカスタマイズ(外部機器連携)
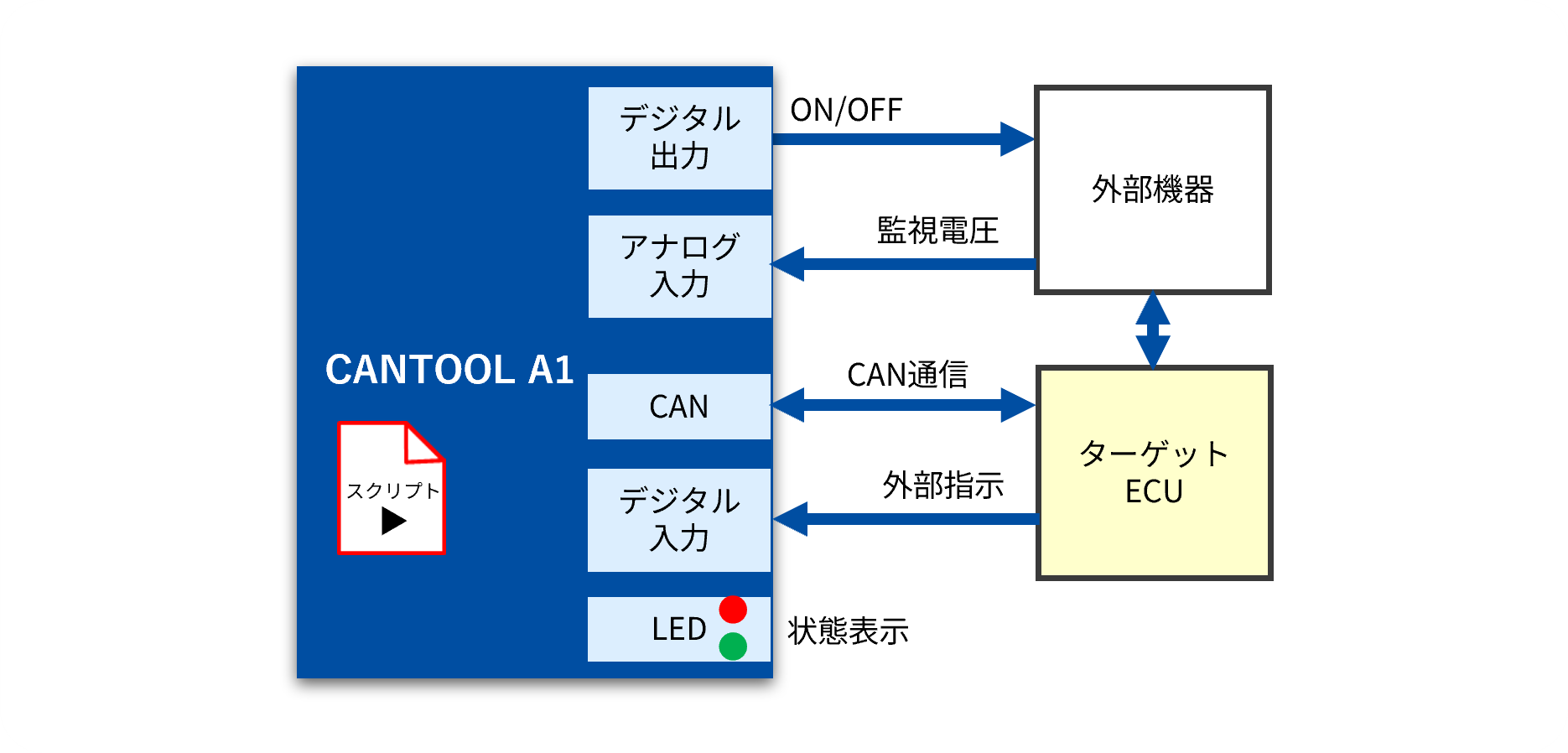
Pythonスクリプトでデジタル/アナログ/RS-232の入出力を制御し、外部機器(電源変動、接点、各種周辺機材等)とCAN制御を組み合わせた試験シーケンスを柔軟に構築できます。お客様の試験手順・設備構成に合わせて自動化・拡張が可能です。
CANTOOL A1で構築できる試験シーケンス例
- 外部電源/接点の制御とCAN試験の同期実行(デジタル入出力+CAN)
- アナログ値(センサ/環境値)を監視し、条件到達で試験を自動開始(アナログ入力+CAN)
- 異常判定時の安全停止+ユーザー通知(LED等)+ログ取得(条件分岐+ログ)
- 外部スイッチ入力やECUの接点入出力を取り込み、治具を含めて試験を統合(デジタル入出力)
製品パッケージ
標準パッケージ
製品型番:CTA101A-D0E1T
付属品 :USBケーブル(Type-A to Type-C / 50 cm)
CANケーブル(2 ch / 50 cm)
CD-ROM(取扱説明書、標準アプリケーション、SDK、各種ツール)
サポート:保守費用不要
ご購入後1年間の電話及びメールサポート
ソフトウェアバージョンアップは無償対応(一部有償の場合あり)
オプション品
CANを3 ch以上使用する場合、また、LINや汎用インターフェースを使用する場合など、用途に応じてオプション品をご選定ください。
ケーブル仕様(長さ・コネクタ形状等)は、お客様の環境に合わせて対応いたします。
| 項目 | 内容 |
| CAN 4 chケーブル | 50 cm D sub × 4(CAN) |
| EXTケーブル |
50 cm |
| LINケーブル |
50 cm |
| T1ケーブル |
50 cm ツイスト(2線) |
| microSDカード |
32 GB(SDHC対応) |
| ACアダプタ | 入力:AC 100V 50 / 60 Hz、出力:DC 12 V / 1 A |
※microSD、microSDHCは、SD-3D, LLCの商標です。
資料ダウンロード

FAQ
Q:CANパケットのエラーフレームの検出や生成は可能でしょうか?
A:ACKエラー等のエラーフレームの検出は可能です。ただし、エラーフレームを生成する機能はございません。
Q:自社の環境で使えるか試したいのですが、貸出サービスはありますか?
A:はい、無償での貸出サービスを行っております。デモ機1台を1ヶ月間ご提供いたします。数に限りがございますので、まずは弊社の問い合わせ窓口までお気軽にお問い合わせください。
Q:当社の試験環境や試験フローに合わせて、専用のハードウェア/アプリケーションを開発してもらえますか?
A:はい、可能です。お客様の試験環境・試験フローに合わせて、専用のハードウェア(治具/インターフェース等)やアプリケーション(操作画面/自動化/ロギング設定等)の受託開発に対応しています。まずは実現したい内容や現状の課題を、問い合わせ窓口までお気軽にご相談ください。